Dwukołowy robot na Raspberry Pi Zero
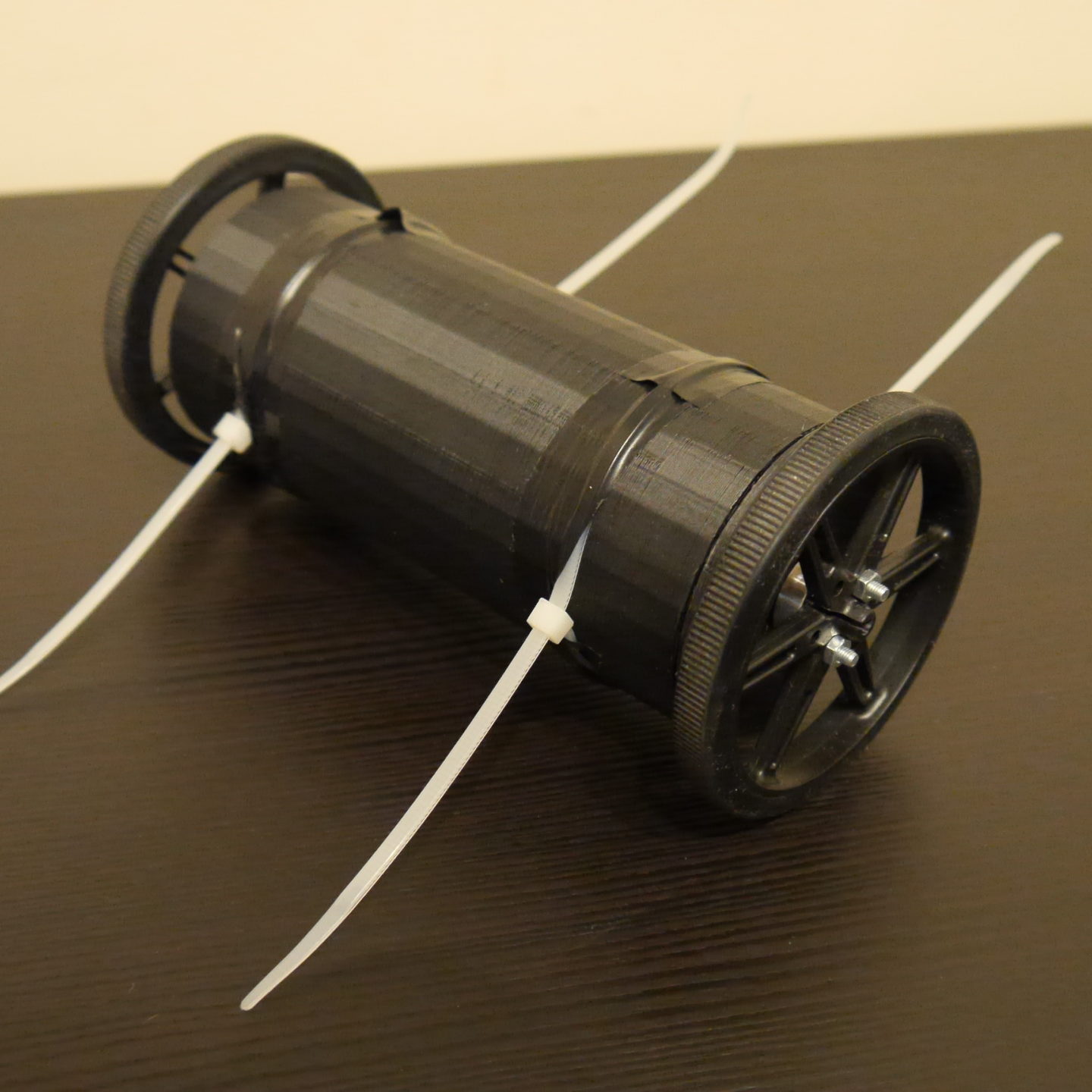
Do niektórych projektów potrzeba czasu. W dzisiejszym odcinku przepis na dwukołowe jeździdło na Raspberry Pi Zero. Na wstępie zaznaczam – na opaskach zaciskowych i taśmie klejącej nie jeden prototyp zbudowano!
Do niektórych projektów potrzeba czasu. W dzisiejszym odcinku przepis na dwukołowe jeździdło na Raspberry Pi Zero. Na wstępie zaznaczam – na opaskach zaciskowych i taśmie klejącej nie jeden prototyp zbudowano!
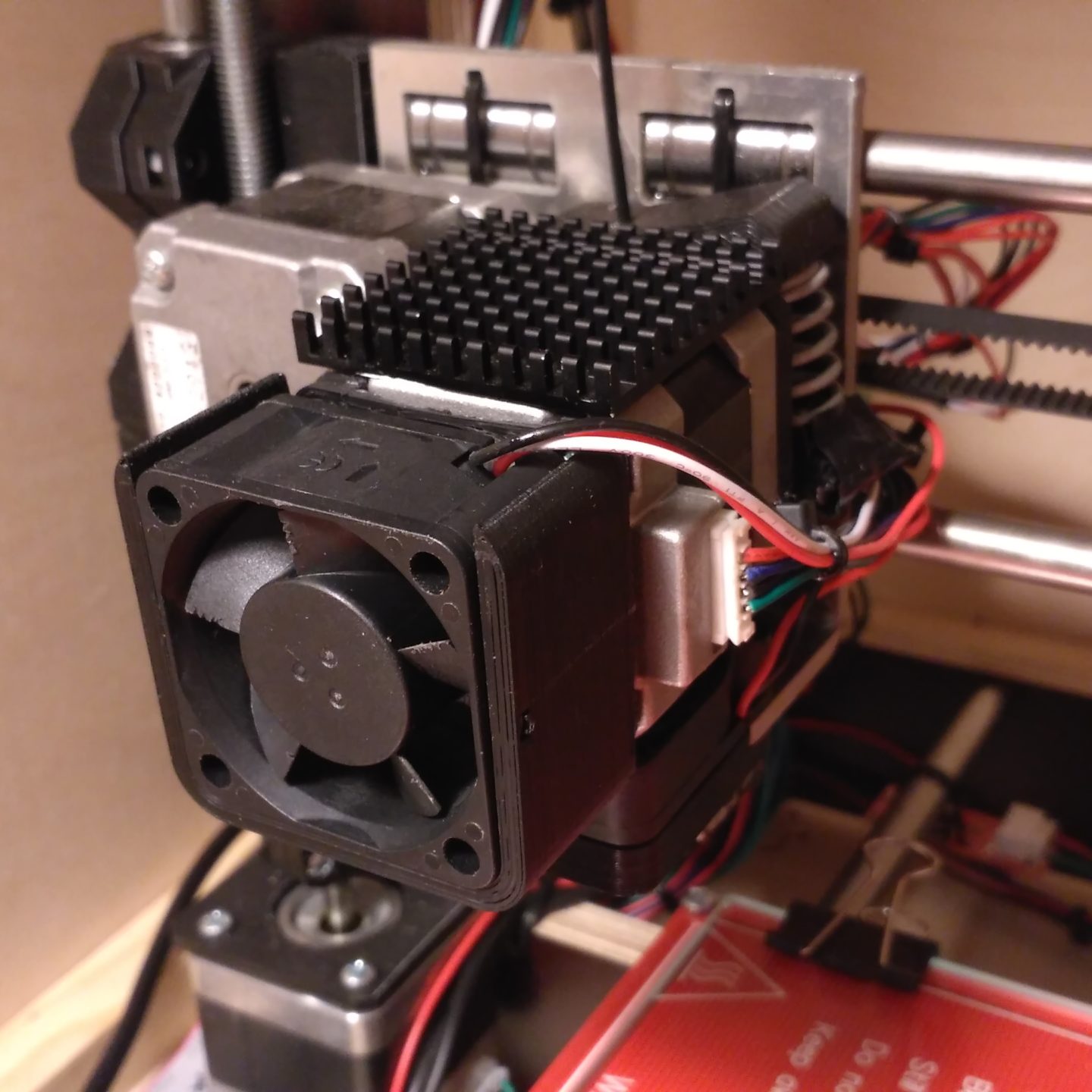
Na potrzeby dodatkowego chłodzenia ekstrudera w trakcie pracy popełniłem mocowanie na standardowy wentylator 40x40mm (np. taki) do silnika krokowego. W górnej części przewidziany jest odstęp pozwalający uciec powietrzu w określonym kierunku, dzięki temu nie będzie leciało chłodne powietrze w stronę drukowanego elementu. Do ściągnięcia tutaj.